
LPM-SCAN является сопутствующим программным обеспечением для систем трехмерного лазерного сканирования LPM-25HA-C, LPM-25HA, LPM-2K, LPM-300VHS и LPM-100VHS. ПО позволяет оператору систем трехмерного сканирования выполнять большое количество задач, включая конфигурирование сенсора, сбор, визуализацию, обработку и архивацию данных. LPM-SCAN работает на базе ОС Windows 95, Windows 98, Windows NT, Windows 2000 и Windows XP. Многочисленные возможности импорта данных позволяют передавать данные LPM в другие программные пакеты пост-обработки данных, например, для выделения объектов или оценки объемов. LPM-SCAN декодирует потоки двоичных данных, поступающих от систем трехмерного сканирования LPM. Во время получения данных в режиме реального времени, LPM-SCAN сохраняет их в промежуточной памяти, при этом предусматривается возможность доступа к файлам и отображения снимков для немедленного просмотра в режиме on-line и дальнейшей обработки потока данных. Запись и сохранение данных в исходном формате позволяет проводить пост-обработку полученных трехмерных изображений в режиме off-line.
 |
|
 |
Визуализация трехмерных данных в виде:
|
 |
|
 |
|


Подключение к системам трехмерного лазерного сканирования серии LPM
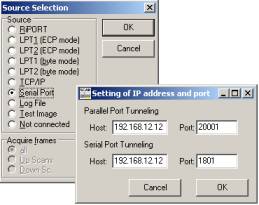 LPM-SCAN осуществляет
получение данных от прибора и конфигурирование сканирующей системы.
Обмен данными осуществляется по стандартному интерфейсу
последовательной передачи данных (RS232 или RS422), имеющемуся
практически на каждом персональном или портативном компьютере.
LPM-SCAN осуществляет
получение данных от прибора и конфигурирование сканирующей системы.
Обмен данными осуществляется по стандартному интерфейсу
последовательной передачи данных (RS232 или RS422), имеющемуся
практически на каждом персональном или портативном компьютере.
Возможность сбора данных через протокол TCP/IP предусматривается всеми операционными системами Windows, что позволяет без проблем интегрировать LPM в локальные сети. Для того чтобы воспользоваться протоколом TCP/IP через ПО LPM-SCAN, приборы серии LPM должны иметь дополнительный интерфейс TCP/IP Ethernet.
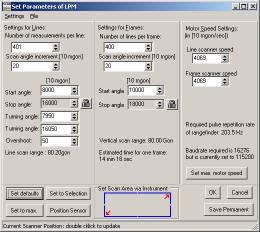
Конфигурирование трехмерного сенсора изображения
Функция конфигурирования обеспечивает интуитивное изменение параметров конфигурации лазерных сенсоров изображения LPM на основе уже полученных данных или вручную с учетом системы координат лазерного сенсора.
 Возможность
конфигурирования освобождает пользователя от необходимости
коммуникации с трехмерным сенсором посредством команд через
интерфейс последовательной передачи данных. Кроме того, правильность
настроек проверяется прежде чем происходит изменение параметров
конфигурации сканирующей системы.
Возможность
конфигурирования освобождает пользователя от необходимости
коммуникации с трехмерным сенсором посредством команд через
интерфейс последовательной передачи данных. Кроме того, правильность
настроек проверяется прежде чем происходит изменение параметров
конфигурации сканирующей системы.
Функции:
- регулирование поля зрения сенсора (вручную джойстиком или на основе полученных данных)
- изменение пространственного разрешения
- изменение скорости сканирования
- оценка времени сканирования
- управление скоростью лазерных измерений
- изменение параметров конфигурации дальномера, включая режим определения цели (по первому или последнему импульсу), разрешение при измерении дальности, конечное разрешение по дальности
- загрузка и сохранение данных конфигурации
- возможность загрузки настроек по умолчанию (стандартные настройки сканирования)
- экспорт данных о конфигурации в формате скрипта LPM-SCAN для автоматизации
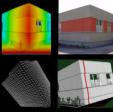
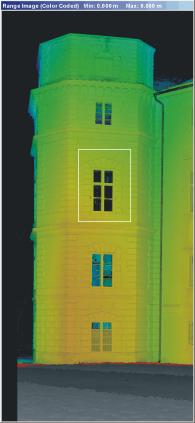
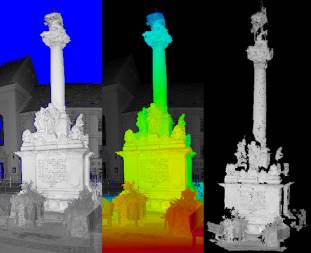
Визуализация трехмерных данных
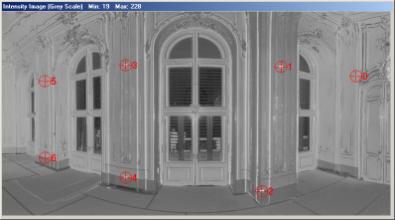
На основе двоичных данных LPM-SCAN представляет данные, как правило, в виде изображения дальности с цветовой кодировкой, в виде изображения интенсивности, демонстрирующего отражающую способность объектов при данной длине волны лазера, и в виде комбинированного изображения дальности и интенсивности. Данные, содержащие информацию об истинном цвете объектов, могут также представляться в виде цветных изображений.
Эти изображения создают условия для выполнения простых измерительных задач, как, например, определение расстояния между двумя объектами, и позволяют отбирать данные для дальнейшей обработки и конфигурирования трехмерных сканеров в оперативном режиме.
-
 изменяемые
схемы цветовой кодировки по дальности и цвету
изменяемые
схемы цветовой кодировки по дальности и цвету
- изменяемые параметры визуализации по дальности и интенсивности отражения
- визуализация эффектов от применения фильтров
- сжатие изображений с реалистичным цветовоспроизведением до представления в обычном формате 24bit-RGB
- выделение опорных точек
- непосредственное получение данных измерений по всем изображениям с помощью курсора
- сохранение изображений в формате BMP и JPEG
Обработка и отбор данных
LPM-SCAN конвертирует двоичные данные, полученные от трехмерного лазерного сенсора изображения, в полярные координаты, прямоугольные координаты, в данные об отражающей способности объектов и в данные об истинном цвете объектов (если сенсор собирает эти данные), применяя для этого все требуемые механизмы декодирования и трансформации.
 Высокая
скорость измерений, осуществляемых трехмерным лазерным сенсором,
позволяет быстро получать большие объемы данных в пределах поля
зрения сенсора. Во многих случаях для дальнейшей обработки требуется
лишь незначительная часть этих данных. LPM-SCAN предлагает
эффективные средства отбора нужной информации об измерениях
благодаря фильтрации данных. Эти фильтры используются для
визуализации данных, а также для экспорта данных, облегчая таким
образом обмен данными с инструментами для пост-обработки данных.
Высокая
скорость измерений, осуществляемых трехмерным лазерным сенсором,
позволяет быстро получать большие объемы данных в пределах поля
зрения сенсора. Во многих случаях для дальнейшей обработки требуется
лишь незначительная часть этих данных. LPM-SCAN предлагает
эффективные средства отбора нужной информации об измерениях
благодаря фильтрации данных. Эти фильтры используются для
визуализации данных, а также для экспорта данных, облегчая таким
образом обмен данными с инструментами для пост-обработки данных.
- преобразование в полярные координаты (собственная система координат сенсора)
- прямое считывание координат, данных об интенсивности отражения и истинном цвете объектов при лазерных измерениях
- отбор по дальности (минимальное и максимальное расстояние до объектов относительно трехмерного лазерного сенсора изображения)
- отбор по интенсивности отражения (отбор данных с учетом отражающей способности при заданной длине лазерных волн)
- фильтр отбора данных с учетом полярных координат
- фильтр близости летательного аппарата; отбор всех данных вблизи от летательного аппарата с определимым расстоянием
- кубический фильтр; отбор всех данных из одного кубического объема
- фильтр ограничения для ручного отбора зон, содержащих данные
- ручной отбор данных по заданному шаблону
- усреднение множества наборов трехмерных данных с целью уменьшения помех
- повторная выборка данных по совмещенным сканам на основе задаваемой пользователем кубической сетки с целью значительного сокращения и сглаживания данных. Данные повторной выборки идеально подходят для расчета изолиний и создания базиса для работы в системе автоматизированного проектирования. На первом снимке справа дается изображение карьера на основе повторной выборки 12 сканов, содержащих 16 млн. информационных точек в сетке 1х1х1, дающей порядка 80 000 информационных точек.
- создание ортогональных проекций по данным сканирования с определением цвета по данным отражающей способности в инфракрасном диапазоне или по данным о цвете, собранным самим лазерным сенсором.
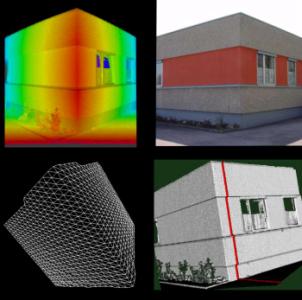

Регистрация и слияние данных
 При преобразовании в
прямоугольные (декартовы) координаты учитывается положение лазерного
сенсора изображения и его ориентация в заранее заданной системе
координат. Трехмерные данные могут регистрироваться в этой
координатной системе с помощью различных методов, например, путем
определения положения и ориентации сенсора относительно заданных
опорных точек с известными координатами. Таким образом, нет
необходимости определять положение и проводить совмещение
трехмерного лазерного сенсора относительно нужной системы координат
до получения данных.
При преобразовании в
прямоугольные (декартовы) координаты учитывается положение лазерного
сенсора изображения и его ориентация в заранее заданной системе
координат. Трехмерные данные могут регистрироваться в этой
координатной системе с помощью различных методов, например, путем
определения положения и ориентации сенсора относительно заданных
опорных точек с известными координатами. Таким образом, нет
необходимости определять положение и проводить совмещение
трехмерного лазерного сенсора относительно нужной системы координат
до получения данных.
Объединение нескольких наборов трехмерных данных позволяет создавать трехмерные модели, которые можно виртуально изучить со всех сторон без каких-либо ограничений. Объединение данных проводится с выделением не менее 4 точек привязки на двух трехмерных изображениях, которые подлежат объединению. Программа LPM-SCAN автоматически рассчитывает данные о положении и ориентации лазерного сенсора в момент получения двух трехмерных изображений.
В случае, когда положение ретроотражающих объектов определяется до получения других данных, процесс слияния проводится в полуавтоматическом режиме с помощью приложения 3D-RiSCAN путем нахождения точек привязки, расчета наилучшего совпадения найденных точек привязки и получения большого объема информации о качестве совпадения (см. скрин-шот справа). Это средство позволяет объединять сканы прямо в полевых условиях, что очень удобно при определении интересующих зон, по которым еще не получены данные или требуется повторное получение данных.
-
 преобразование в
прямоугольные координаты на основе данных о положении и ориентации
лазерного сенсора
преобразование в
прямоугольные координаты на основе данных о положении и ориентации
лазерного сенсора
- получение данных о положении и ориентации лазерного сенсора по опорным точкам, выделенным в составе данных
- сохранение и загрузка данных о положении и ориентации сенсора
- слияние нескольких наборов трехмерных данных на основе общих точек в объединяемых наборах данных; идентификацию можно проводить по интенсивности (отражающей способности, дальности и/или истинному цвету)
Сохранение и экспорт данных
Исходный формат файла, в котором хранятся трехмерные данные, соответствует формату потока данных, поступающих от приборов серии LPM. Экспорт данных в стандартные форматы позволяет легко передавать данные в другие программные средства обработки трехмерных данных.
-
 возможность
сохранения трехмерных данных одного скана или последовательности
сканов
возможность
сохранения трехмерных данных одного скана или последовательности
сканов
- возможность прикрепления к данным метки времени с высоким разрешением, включая время по встроенным часам ПК
- изменяемые параметры автоматической триангуляции данных о поверхности
- экспорт данных в виде облака точек или триангулированных ячеек поверхности
- экспорт данных в форматах VRML, в текстовом виде (ASCII), в форматах VTK, STL, OBJ, DXF, PIF (PolyWorks), 3DD (исходный формат двоичных данных)
- определяемый пользователем формат строки данных и содержание строки данных в формате ASCII
- автоматическое текстурирование трехмерных моделей отображением цветовой кодировкой дальности, изображением интенсивности или изображением истинного цвета
- текстурирование в виде геометрического изображения или непосредственно как атрибут информационных точек
- экспорт изображений в виде текстуры на сферических сегментах в соответствии с полем зрения
- экспорт всех изображений в формате Windows BMP или JPEG
Создание сценариев для LPM-SCAN
 Возможность
написания сценариев для LPM-SCAN позволяет автоматизировать
стандартные операции по обработке данных и позволяет разделять или
объединять в пакеты задания для LPM-SCAN.
Возможность
написания сценариев для LPM-SCAN позволяет автоматизировать
стандартные операции по обработке данных и позволяет разделять или
объединять в пакеты задания для LPM-SCAN.
- изменение параметров интерфейсных портов для получения и конфигурирования данных
- управление получением, сохранением и экспортом данных
- конфигурирование подключенных трехмерных лазерных сенсоров
- назначение заданий функциональным клавишам
Прочие функции
- автоматическое извлечение списка светоотражающих марок, используемых при объединении данных и определения положения и ориентации
- подгонка плоскости к отобранным данным методом наименьших квадратов
- расчет стандартных отклонений данных
- определение координатной системы на основе полученных данных
- прокрутка закодированного изображения дальности при работе трехмерного лазерного сенсора изображения в режиме линейного сканирования
- конфигурируемое отображение больших значений средней дальности в режиме линейного сканирования (высота над землей)
- таблица необработанных данных
Системные требования
Перечень технических данных LPM-SCAN, Октябрь 2002
Персональный или портативный компьютер с ОС Windows 95, Windows 98, Windows NT4.0, Windows 2000, Windows XP. Рекомендуется: Pentium II или AMD K6-II или лучше, 64 Мб ОЗУ, 500 Мб свободного места на диске. Для прямого получения данных через интерфейс параллельной передачи данных требуется параллельный порт ЕСР.
Приведенные сведения являются, по мнению Reigl, точными и надежными, однако компания Riegl не принимает на себя ответственность за использование этих сведений. Технические данные могут изменяться без уведомления.